El OpenRov ha abierto la puerta a la exploración subacuática de bajo coste. Un Robot submarino (ROV), que nos permite unas dos horas de inmersión sin riesgos, en lugares pequeños, tomando datos y a un coste muy bajo.
Según algunos videos que he ido localizando, podemos marcar el límite del Openrov en unos 115 o 120 metros de profundidad, aunque hay quien lo ha llevado hasta los 200 metros:
Más de 50 metros ya es un gran logro, porque es donde empieza a ser dificil bajar con botellas, peligroso, caro y reservado para unos pocos, por tanto es donde aparece el reto. El objetivo: Llegar a los 400 metros.
Para llegar a 400 metros nos encontramos varios problemas:
– Los O-rings o juntas tóricas actuales son 2, una por cada lado.
– El cilindro central es de un grosor de unos 3mm
– El cable del tether con el que recibimos el video y transmitimos ordenes tiene un límite teórico en 300m.
– Motores y cilindros de baterías….
Yo en estos primero desarrollos me voy a centrar en el cilindro central, porque es donde considero que está la mayor dificultad. Empiezo por lo dificil para no encontrarme después en un callejón sin salida.

Mi idea inicial es mantener la misma estructura del openrov actual, pero «vitaminandola», este proceso nos llevará a ir redimensionando todo de dentro a afuera. Una vez tengamos un cilindro funcional habra que ir readaptando el resto de partes.
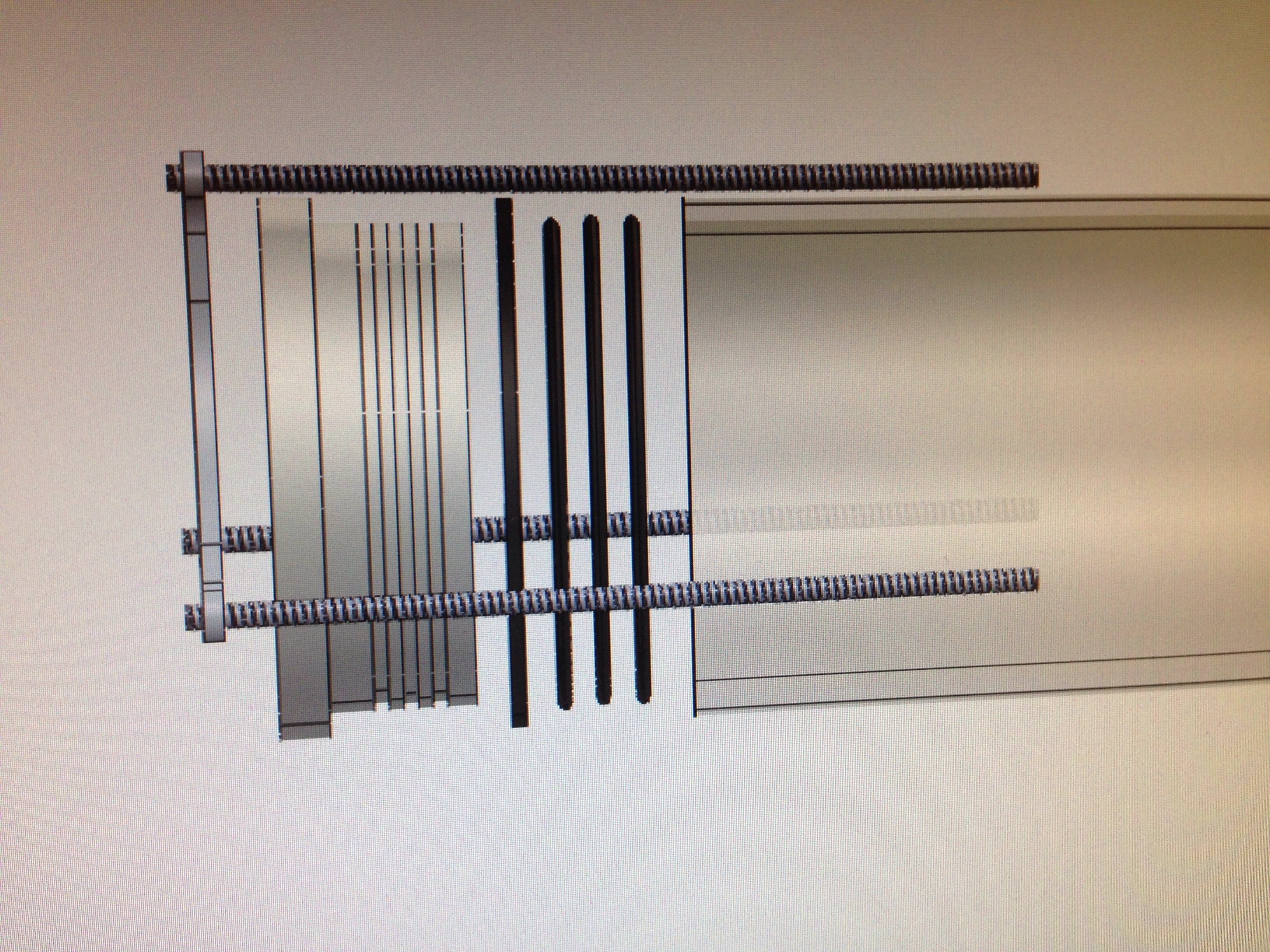
En este boceto me planteo 4 juntas tóricas por cada lado, en lugar de 1 y un cilindro central de 5 mm de pared, en lugar de 3. He añadido una «araña» externa que encapsulará el cilidro con varillas roscadas y tuercas.
El cilindro que he localizado es de 110 x 100 mm (externo-interno), cuando el actual es de 100×94 mm. Adicionalmente crece lateralmente para acomodar las tóricas, con lo que el diseño actual no nos vale, no es un reemplazo sencillo, hay que ir cambiando muchas piezas. Lo ideal habría sido algo de 105×94… pero no existe y no podemos fabricar a medida porque entonces ya no sería rentable.
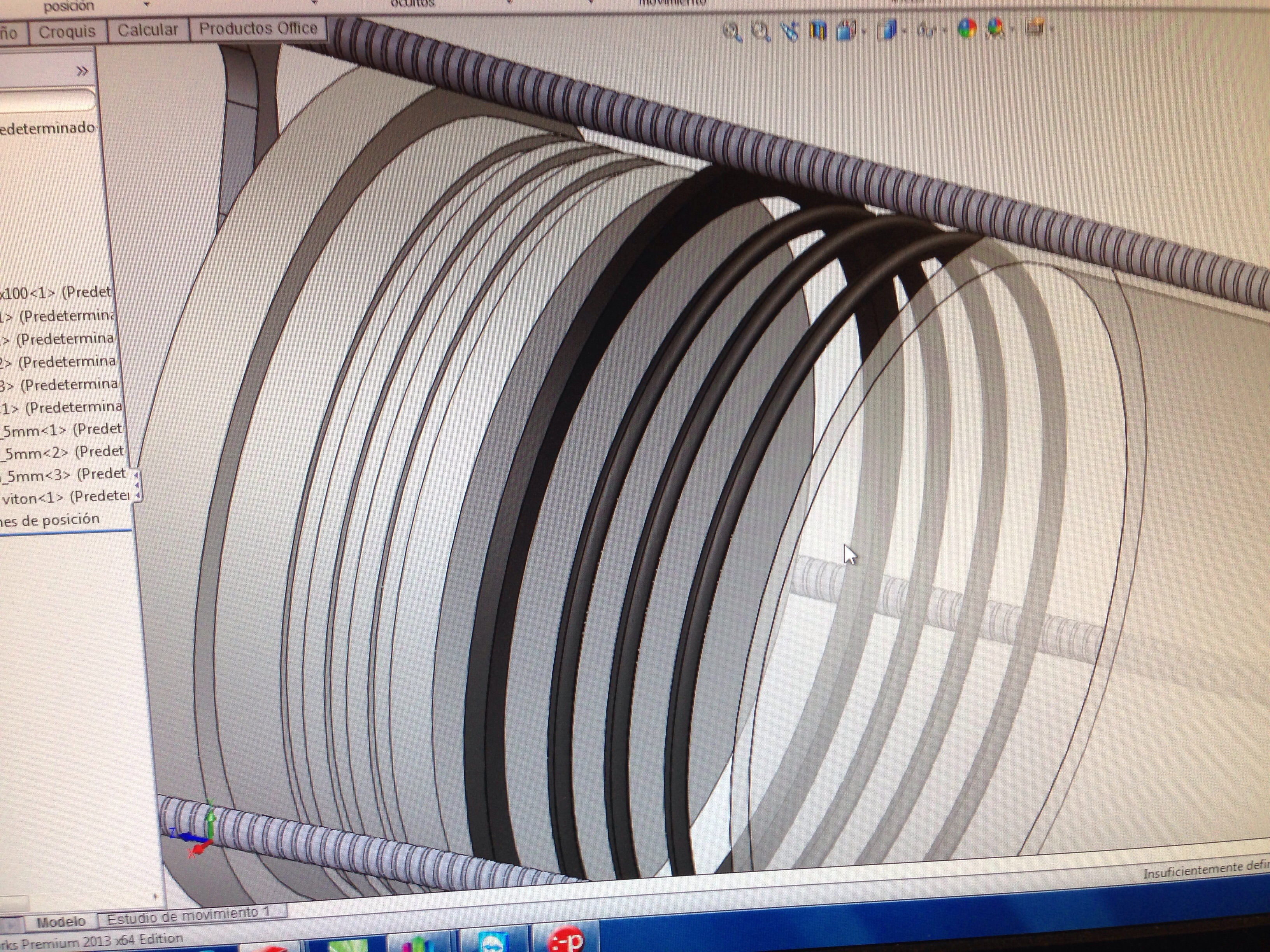
Las juntas redondas son las mismas que lleva el openrov actual. Son fáciles de localizar y baratas, no hay por que cambiar. La Junta plana es un añadido que nos va a permitir realizar un sellado más y, amortiguar la presión del tapón contra el lateral del cilindro. De momento no la he localizado plana, sino redonda, con lo que quizás haya que ir haciendo modificaciones al diseño.
¿Por qué la araña?
Dentro del cilindro hay aire. Ahora mismo, en muchas ocasiones, le sacamos algo aire con una bomba de vacio antes de la inmersión para poder bajar con más facilidad y, además, evitar la expansión del aire de dentro del cilindro cuando se caliente.
El aire responde a la presión y a la temperatura. A medida que bajo ocupa menos volumen y flota menos (mayor presión) Ver Ley de Boyle-Mariotte. Esto es si la temperatura es constante. Teoricamente debo volver a la superficie con el mismo volumen de aire que salí. El tema es que el aire tambien cambia de volumen con respecto a la temperatura, Ver Ley de Gay-Lussac, con lo que si el aire de dentro se calienta durante la inmersión vamos a tener un volumén de aire superior al llegar arriba. Y lo tenemos, porque la electrónica se calienta, y mucho.
Esto no sería muy problematico si no fuera por el sistema que tiene el openrov de compensación de presiones entre el interior y el exterior del cilindro. Está hecho con unas jeringas. Es ingenioso, muy económico y altamente efectivo, pero si el volumen de dentro llegase a ser muy alto podría hacer la saltar la jeringa y entraría agua. Aparte, al hacer vaciado de aire le estamos «robando» capacidad de inmersión al ROV, es como si a superficie estuviesemos ya a X metros, en función de lo que le quitemos.
Por tanto mi idea es montar una válvula de compensación de verdad, que aguante bastante presión y que me permita no tener que sacar aire del cilindro para comenzar la inmersión. Es más, yo quiero cargarlo de aire, con lo que igualaré presiones a X profundidad y jugaré con esos metros extras. Todo pasa por encontrar la valvula adecuada y contar con algo que aguante los tapones en su sitio. La araña.
El tapón he pensado llevarlo a cabo en un tornero, me gustaría hacerlo de aluminio. Lo único que me frena un poco es la diferencia de dureza entre el tapón y el tubo acrílico. Habrá que tener mucho cuidado al manipular para no arañarlo. Con respecto a la araña aluminio también, pero es un diseño 2D, con lo que cortarlo en CNC es sencillo.
El objetivo #1 es hacer un prototipo, lastrarlo y bajarlo, a ver si aguanta o implota y si implota a ver a que profundidad lo hace.
Este post lo subo al foro de OpenRov.es donde podemos hablar de todo ello! >>> Ver post en Openrov.es