Hace algunas semanas tuve la suerte de conocer a algunos integrantes del departamento de zoología de la Universidad de Biología, Sevilla. Fué en Cádiz, en los talleres de Openrov España. Luego nos volvimos a ver en Sevilla y les llevé de visita al Fablab, para que pudieran conocer de primera mano algunas de las maravillas que se pueden fabricar a unos 200 metros de su lugar de trabajo.
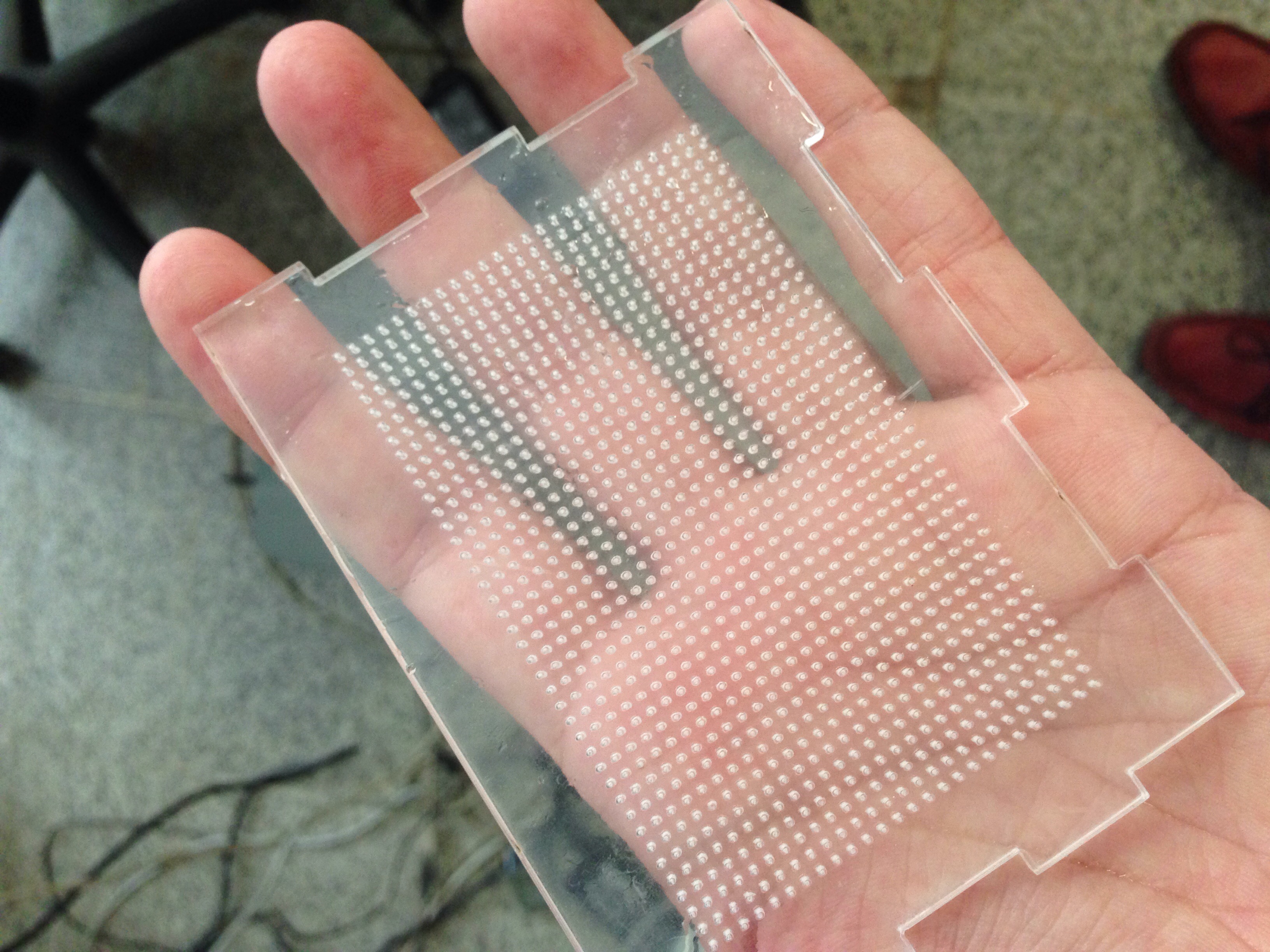
De esta primera visita se planteó la posibilidad de fabricar un Larvario para corales. El problema que tenían es que las larvas de coral naranja (Astroides Calycularis) tienen un diametro de unos 2 mm, con una cabeza en forma pseudocónica que hace que se queden atascados si los agujeros no son lo suficientemente pequeños. 0,5 mm de diámetro por agujero fue el límite que nos marcamos. Dicho y hecho, al día siguiente ya estaba listo el prototipo de «Larvatrón«, listo para cortar en el Fablab.
El material elegido fue metacrilato de 3mm de grosor. Juan Carlos hizo su magia, retocó la forma en que diseñé la matriz de agujeros y lanzamos el primer corte. El método de pegado fue como el de los Openrov, con cloroformo, el cual suelda las caras del metacrilato unas a otras.
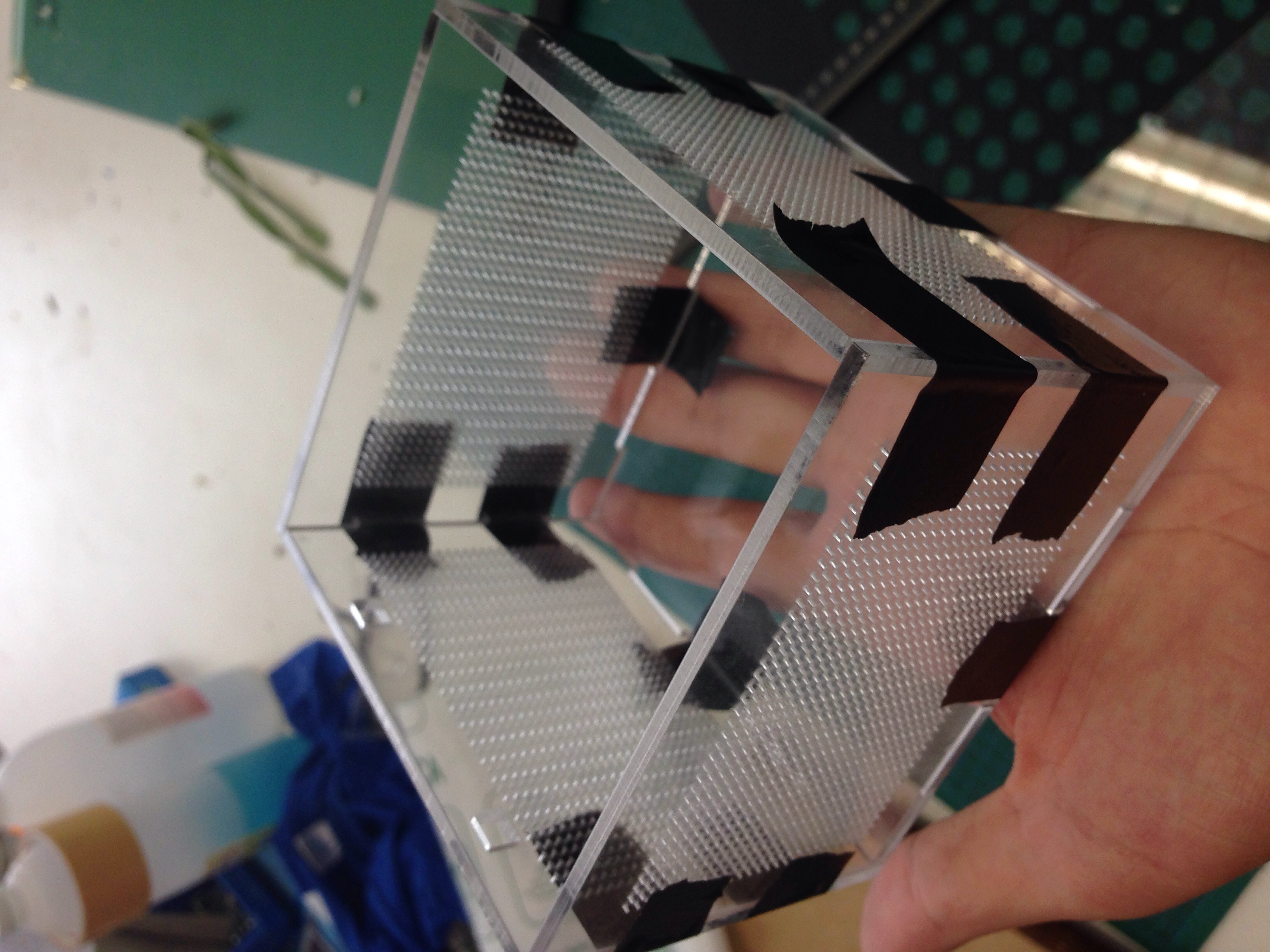
Lo diseñé con un machihembrado que permitiera no errar en la posición ni un solo milímetro. Necesitabamos mucha precisión para que las larvas no escapasen por huecos o rendijas.
Aquí arriba podemos ver como está hecha la presentación del cubo, listo para ser pegado arista a arista.
El Larvatrón ya completado y un par de imágenes de orgullo enviadas por Pablo e Irene, de Biología, las larvas ya en el larvario, y éste cumpliendo su cometido perfectamente.
Si quereis saber un poco más del Astroides Calycularis os dejo un video muy interesante del mismo y donde se explica que se encuentra amenazado. Me ha dado alegría saber que una de sus zonas son los acantilados de Maro-Cerro Gordo. Ahora, la próxima vez que lo vea ya sabré quien es. Una buena misión para el Openrov.
El OpenRov ha abierto la puerta a la exploración subacuática de bajo coste. Un Robot submarino (ROV), que nos permite unas dos horas de inmersión sin riesgos, en lugares pequeños, tomando datos y a un coste muy bajo.
Según algunos videos que he ido localizando, podemos marcar el límite del Openrov en unos 115 o 120 metros de profundidad, aunque hay quien lo ha llevado hasta los 200 metros:
Más de 50 metros ya es un gran logro, porque es donde empieza a ser dificil bajar con botellas, peligroso, caro y reservado para unos pocos, por tanto es donde aparece el reto. El objetivo: Llegar a los 400 metros.
Para llegar a 400 metros nos encontramos varios problemas:
– Los O-rings o juntas tóricas actuales son 2, una por cada lado.
– El cilindro central es de un grosor de unos 3mm
– El cable del tether con el que recibimos el video y transmitimos ordenes tiene un límite teórico en 300m.
– Motores y cilindros de baterías….
Yo en estos primero desarrollos me voy a centrar en el cilindro central, porque es donde considero que está la mayor dificultad. Empiezo por lo dificil para no encontrarme después en un callejón sin salida.
Mi idea inicial es mantener la misma estructura del openrov actual, pero «vitaminandola», este proceso nos llevará a ir redimensionando todo de dentro a afuera. Una vez tengamos un cilindro funcional habra que ir readaptando el resto de partes.
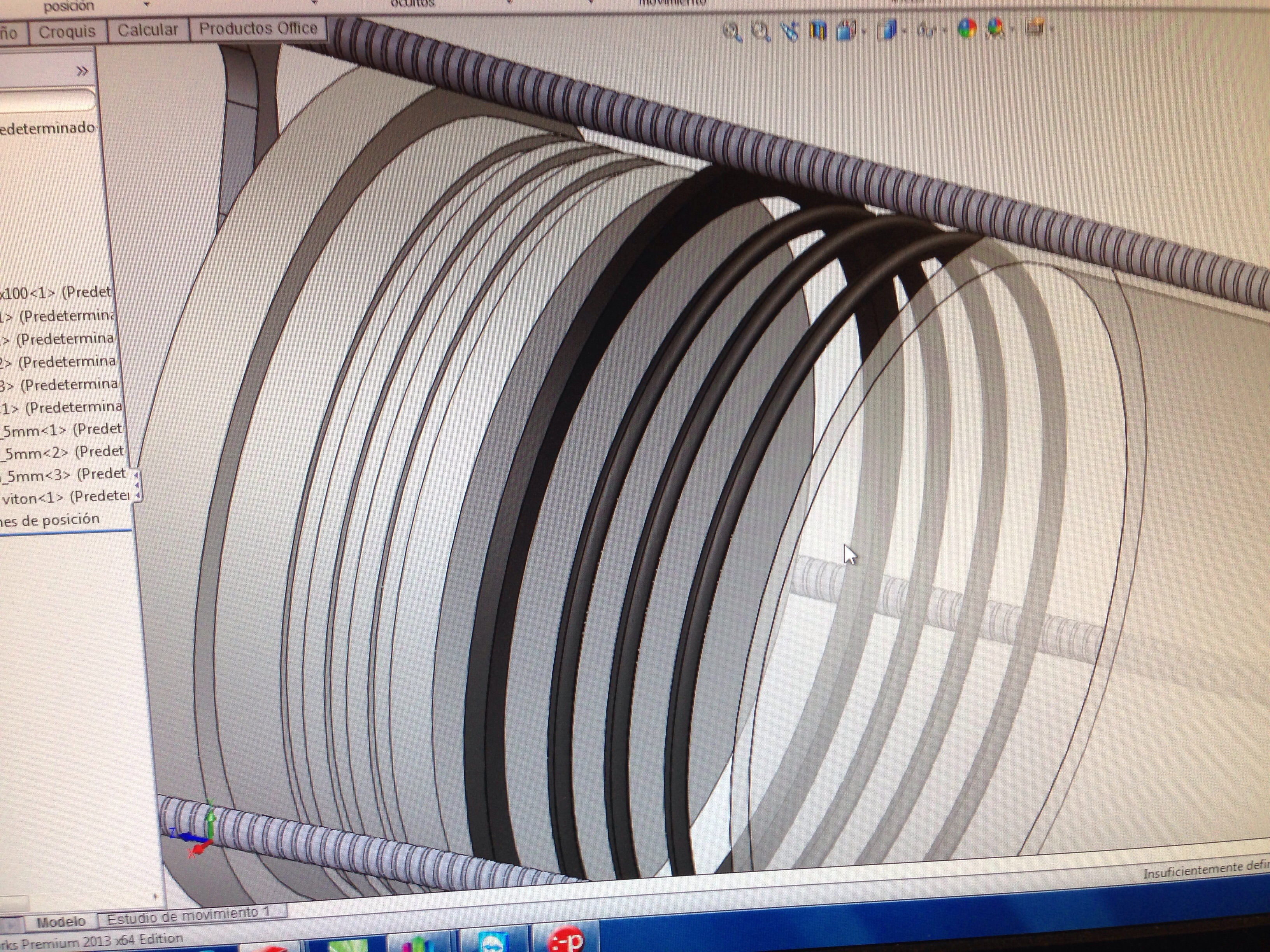
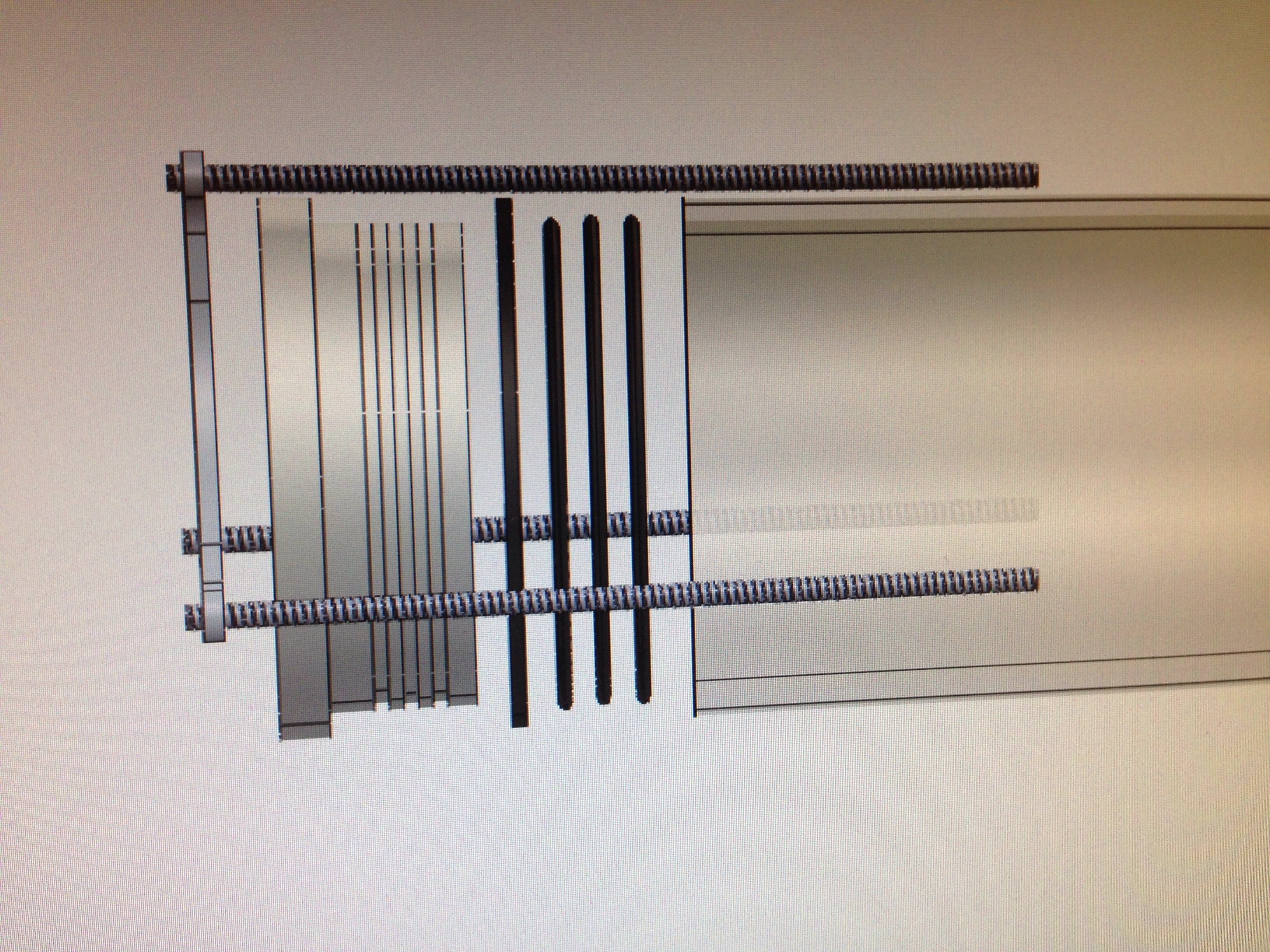
En este boceto me planteo 4 juntas tóricas por cada lado, en lugar de 1 y un cilindro central de 5 mm de pared, en lugar de 3. He añadido una «araña» externa que encapsulará el cilidro con varillas roscadas y tuercas.
El cilindro que he localizado es de 110 x 100 mm (externo-interno), cuando el actual es de 100×94 mm. Adicionalmente crece lateralmente para acomodar las tóricas, con lo que el diseño actual no nos vale, no es un reemplazo sencillo, hay que ir cambiando muchas piezas. Lo ideal habría sido algo de 105×94… pero no existe y no podemos fabricar a medida porque entonces ya no sería rentable.
Las juntas redondas son las mismas que lleva el openrov actual. Son fáciles de localizar y baratas, no hay por que cambiar. La Junta plana es un añadido que nos va a permitir realizar un sellado más y, amortiguar la presión del tapón contra el lateral del cilindro. De momento no la he localizado plana, sino redonda, con lo que quizás haya que ir haciendo modificaciones al diseño.
¿Por qué la araña?
Dentro del cilindro hay aire. Ahora mismo, en muchas ocasiones, le sacamos algo aire con una bomba de vacio antes de la inmersión para poder bajar con más facilidad y, además, evitar la expansión del aire de dentro del cilindro cuando se caliente.
El aire responde a la presión y a la temperatura. A medida que bajo ocupa menos volumen y flota menos (mayor presión) Ver Ley de Boyle-Mariotte. Esto es si la temperatura es constante. Teoricamente debo volver a la superficie con el mismo volumen de aire que salí. El tema es que el aire tambien cambia de volumen con respecto a la temperatura, Ver Ley de Gay-Lussac, con lo que si el aire de dentro se calienta durante la inmersión vamos a tener un volumén de aire superior al llegar arriba. Y lo tenemos, porque la electrónica se calienta, y mucho.
Esto no sería muy problematico si no fuera por el sistema que tiene el openrov de compensación de presiones entre el interior y el exterior del cilindro. Está hecho con unas jeringas. Es ingenioso, muy económico y altamente efectivo, pero si el volumen de dentro llegase a ser muy alto podría hacer la saltar la jeringa y entraría agua. Aparte, al hacer vaciado de aire le estamos «robando» capacidad de inmersión al ROV, es como si a superficie estuviesemos ya a X metros, en función de lo que le quitemos.
Por tanto mi idea es montar una válvula de compensación de verdad, que aguante bastante presión y que me permita no tener que sacar aire del cilindro para comenzar la inmersión. Es más, yo quiero cargarlo de aire, con lo que igualaré presiones a X profundidad y jugaré con esos metros extras. Todo pasa por encontrar la valvula adecuada y contar con algo que aguante los tapones en su sitio. La araña.
El tapón he pensado llevarlo a cabo en un tornero, me gustaría hacerlo de aluminio. Lo único que me frena un poco es la diferencia de dureza entre el tapón y el tubo acrílico. Habrá que tener mucho cuidado al manipular para no arañarlo. Con respecto a la araña aluminio también, pero es un diseño 2D, con lo que cortarlo en CNC es sencillo.
El objetivo #1 es hacer un prototipo, lastrarlo y bajarlo, a ver si aguanta o implota y si implota a ver a que profundidad lo hace.
Este post lo subo al foro de OpenRov.es donde podemos hablar de todo ello! >>> Ver post en Openrov.es
Hoy he completado la primera de las pruebas de estanqueidad del Openrov y todo parece indicar que ha sido un éxito.
Días atrás estuve sacando aire del cilindro central y haciendo pruebas con una herramienta de purgado de frenos. Así le sacaba el aire y observaba si mantenía la presión negativa. Después de repasar algunas juntas parecía que todo iba bien, así que lo he metido 24 horas bajo agua, sin electrónica y lastrado, y los cilindros han salido totalmente secos. Ahora poco a poco hay que ir bajando metros a ver si todo sigue bien o empiezan a aparecer fugas.
Baterías
El tema de las baterías es algo que no me gusta del Openrov desde que lo recibí. Las baterías en si están muy bien y son LiFePo4, con lo que la tranquilidad está asegurada. No arden ante un corto ni ante una caida de tensión por debajo del umbral mínimo como puede pasar con las LiPo. Por contra tienen algo menos de voltaje. El tema es que las cargan con cargadores convencionales, 1 cargador por cada pareja de baterías. Tarda muchas horas, ocupas 3 enchufes y no sabes nada de la descarga previa que tuviste, es decir, no sabes los miliamperios que has descargado y vuelto a cargar. Para mi no es un sistema válido.
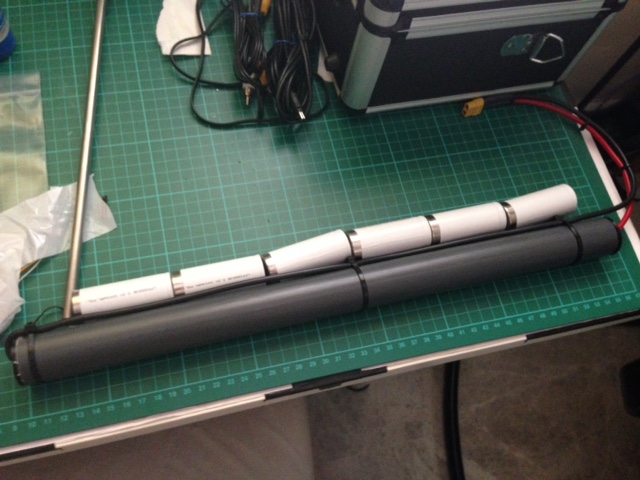
Para solucionar esto he preferido usar el cargador que tengo para los multicopteros, aviones, coches y demás fauna RC. El típico cargador de Lipo, Lifepo y baterías más antiguas. Lo único que había que hacer era buscar un tubo de PVC de la medida aproximada (unos 30mm de interior), diseñar unos tapones, soldar un conector y adaptar unos muelles del chino.
Luego configuramos el cargador para que baje el voltaje al de la unidad de LiFe, seleccionamos 6S, 1.5A de carga y en unas dos horas tenemos las 6 baterías listas, sabiendo la carga que le hemos metido.
Explorar y llegar a donde no llega nadie (o llegan muy pocos) es un sueño. Al menos es el mio y pienso que el de muchas personas.
Si a esto le añadimos una gran pasión por el mar, llegamos a los ROV, esos Robots submarinos de las películas que se adentran en las profundidades, en donde no llega ni la luz, en donde pensamos que encontraremos misterios por explorar.
Un ROV es, o era, algo inalcanzable, solo accesible a los cazatesoros, gobiernos o James Cameron. Decidido a construirme «algo» que me permitiera ver el fondo marino y tras leer acerca de ROVs caseros llegue al proyecto OpenRov.
Se trata de un ROV abierto, una plataforma colaborativa, donde unos auténticos cracks de la electrónica y la ingeniería han desarrollado un modelo accesible,y que permite profundidades totalmente imposibles para una persona con oxígeno, mezclas o apnea. OpenRov cuenta con una web, OpenExplorer, a través de la cual podemos planificar una misión e ir desarrollándola y así, por OpenExplorer fué como les conocí.
A través de un programa de ayudas de La Fundación Moore, la cual colabora estrechamente con David Lang y OpenRov, accedí a un kit de Robot. Esto fué en Agosto’14 y unos meses después recibí lo prometido, un kit versión 2.6. Mi parte del trato, explorar y compartir.
Sherlock, como le he llamado, está al 90%. Queda poco para el agua!

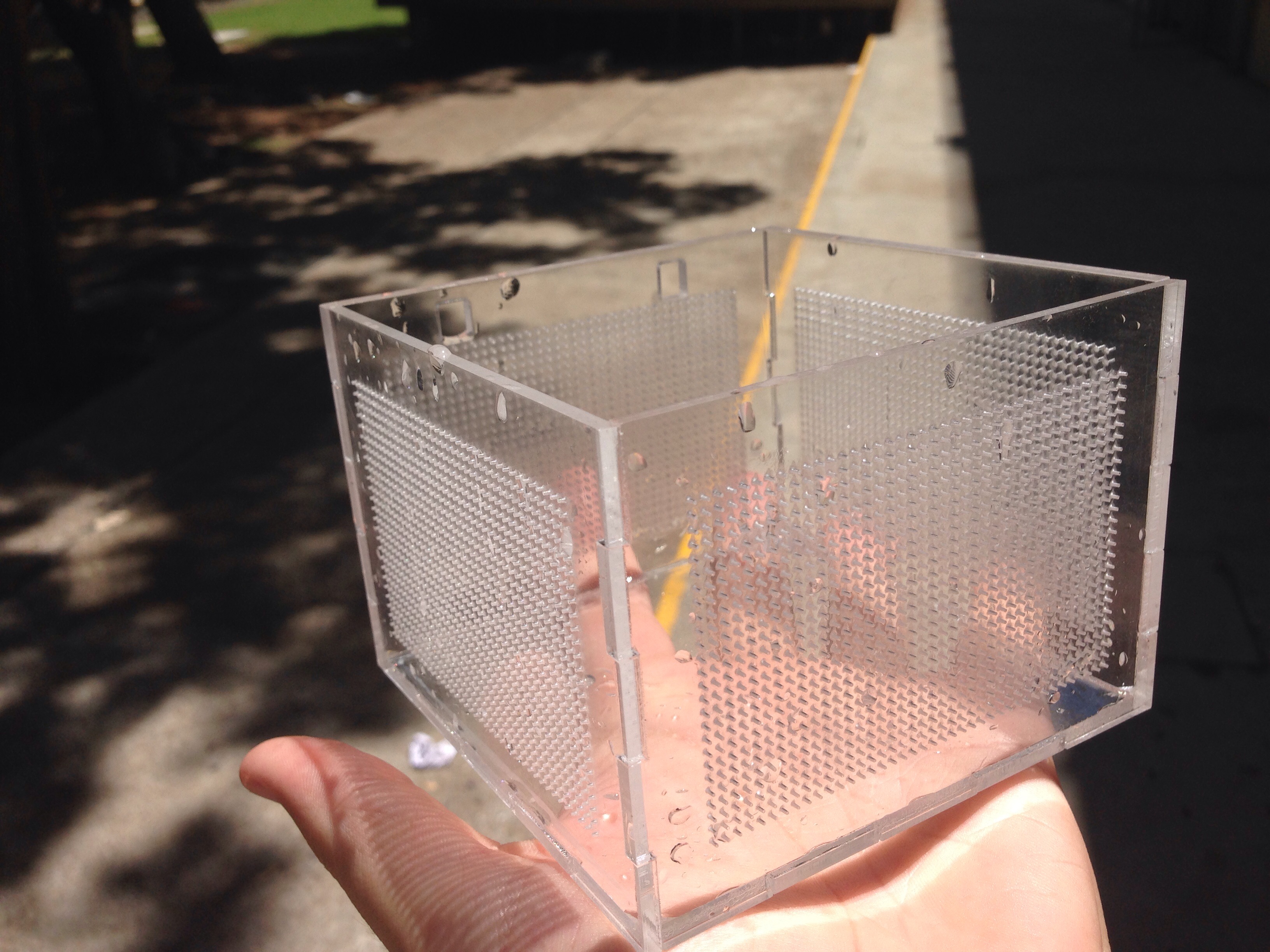


 enviadas por Pablo e Irene, de Biología, las larvas ya en el larvario, y éste cumpliendo su cometido perfectamente.
enviadas por Pablo e Irene, de Biología, las larvas ya en el larvario, y éste cumpliendo su cometido perfectamente.